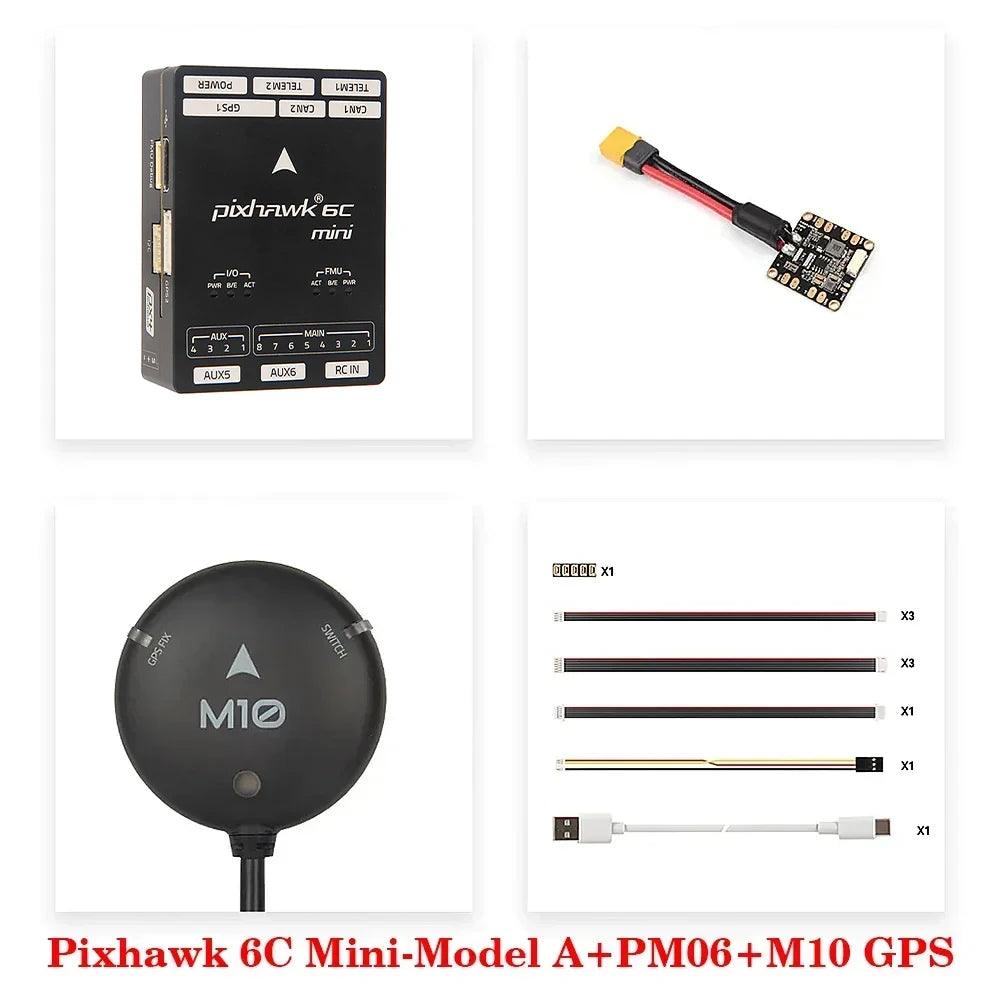
Holybro Pixhawk 6C Mini Modell A Flugcontroller
Holybro Pixhawk 6C Mini Modell A Flugcontroller
369 auf Lager
Verfügbarkeit für Abholungen konnte nicht geladen werden
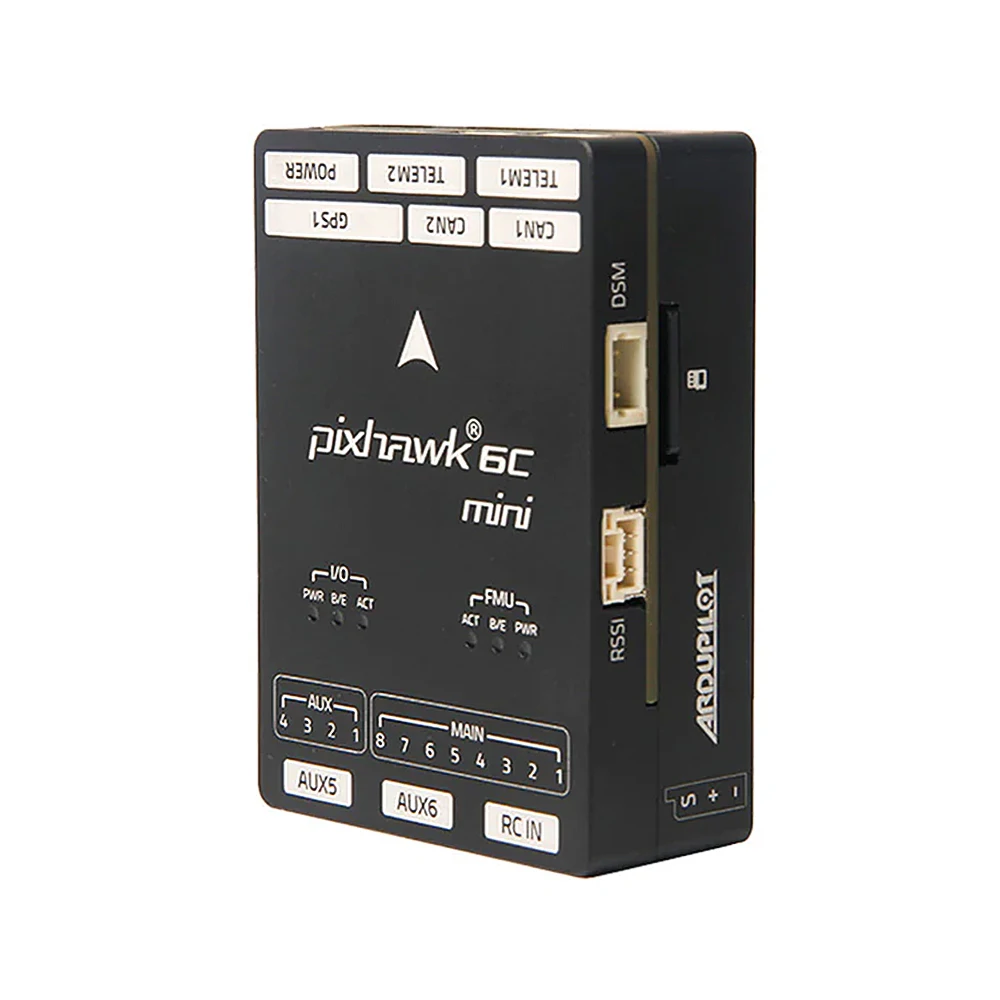
Der Pixhawk® 6C Mini ist das neueste Update der erfolgreichen Pixhawk® Flugcontroller-Familie, basierend auf dem Pixhawk® FMUv6C Open Standard und Connector Standard. Er teilt sich denselben STMH743 Mikroprozessor und dieselben Sensoren wie der Pixhawk® 6C. Im Vergleich zum Standard Pixhawk® 6C verfügt diese Mini-Version über einen integrierten PWM-Header, und einige Anschlüsse wurden entfernt, um diesen Mini-Formfaktor zu ermöglichen.
Im Inneren des Pixhawk® 6C Mini befindet sich ein STMicroelectronics®-basierter STM32H743, gepaart mit Sensortechnologie von Bosch® & InvenSense®, der Ihnen Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bietet, geeignet sowohl für akademische als auch kommerzielle Anwendungen.
Der H7-Mikrocontroller des Pixhawk® 6C Mini enthält den Arm® Cortex®-M7 Kern, der mit bis zu 480 MHz läuft und über 2 MB Flash-Speicher und 1 MB RAM verfügt. Dank der aktualisierten Verarbeitungsleistung können Entwickler produktiver und effizienter bei ihrer Entwicklungsarbeit sein, was komplexe Algorithmen und Modelle ermöglicht.
Der offene FMUv6C-Standard umfasst leistungsstarke, rauscharme IMUs an Bord, die kostengünstig sind und gleichzeitig IMU-Redundanz bieten. Ein Vibrationsisolationssystem filtert hochfrequente Vibrationen heraus und reduziert Rauschen, um genaue Messwerte zu gewährleisten, wodurch Fahrzeuge eine bessere Gesamtflugleistung erzielen können.
Der Pixhawk® 6C Mini ist perfekt für Entwickler in Unternehmensforschungslaboren, Start-ups, Akademiker (Forschung, Professoren, Studenten) und kommerzielle Anwendungen.
Wesentliche Designpunkte
Hochleistungs-STM32H743-Prozessor mit mehr Rechenleistung & RAM
Neues kostengünstiges Design in kleinem Formfaktor
IMU-Redundanz mit Sensortechnologie von Bosch® & InvenSense®
Integriertes Vibrationsisolationssystem zur Filterung hochfrequenter Vibrationen und Reduzierung von Rauschen, um genaue Messwerte zu gewährleisten
IMUs sind durch integrierte Heizwiderstände temperaturgeregelt, um eine optimale Betriebstemperatur der IMUs zu ermöglichen
Hardware-schaltbarer 3,3V oder 5V PWM-Signalmodus (erfordert das Öffnen des Gehäuses)
Prozessoren & Sensoren
-
FMU-Prozessor: STM32H743
32 Bit Arm® Cortex®-M7, 480 MHz, 2 MB Speicher, 1 MB SRAM
-
IO-Prozessor: STM32F103
32 Bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
-
Onboard-Sensoren
Beschleunigungsmesser/Gyroskop: ICM-42688-P
Beschleunigungsmesser/Gyroskop: BMI088 (BMI055 aufgrund der Einstellung der Produktion des Sensors nicht mehr verfügbar)
Magnetometer: IST8310
Barometer: MS5611
Elektrische Daten
-
Spannungswerte:
Max. Eingangsspannung: 6V
USB-Stromversorgung: 4,75~5,25V
Servo-Rail-Eingang: 0~36V
Die neue Version Modell A bietet jetzt ein stabileres PWM-Signal unter Last
-
Stromwerte:
Telemetrie 1 & GPS2 kombinierte Strombegrenzung: 1,5A
Alle anderen Anschlüsse kombinierte Strombegrenzung: 1,5A
Betriebstemperatur: -40 ~ 85°C
Mechanische Daten
Abmessungen (Modell A Legacy): 53,3 * 39 * 16,2 mm
Abmessungen (Modell A Aktuell): 54,3x39x17,5 mm
Gewicht (Modell A Legacy): 39,2g
Gewicht (Modell A Aktuell): 42,4g
M10 GPS erfordert PX4 1.14 & ArduPilot 4.3 oder neuer.