Holybro Pixhawk 6C Mini-Modell B Flugcontroller
Holybro Pixhawk 6C Mini-Modell B Flugcontroller
369 auf Lager
Verfügbarkeit für Abholungen konnte nicht geladen werden
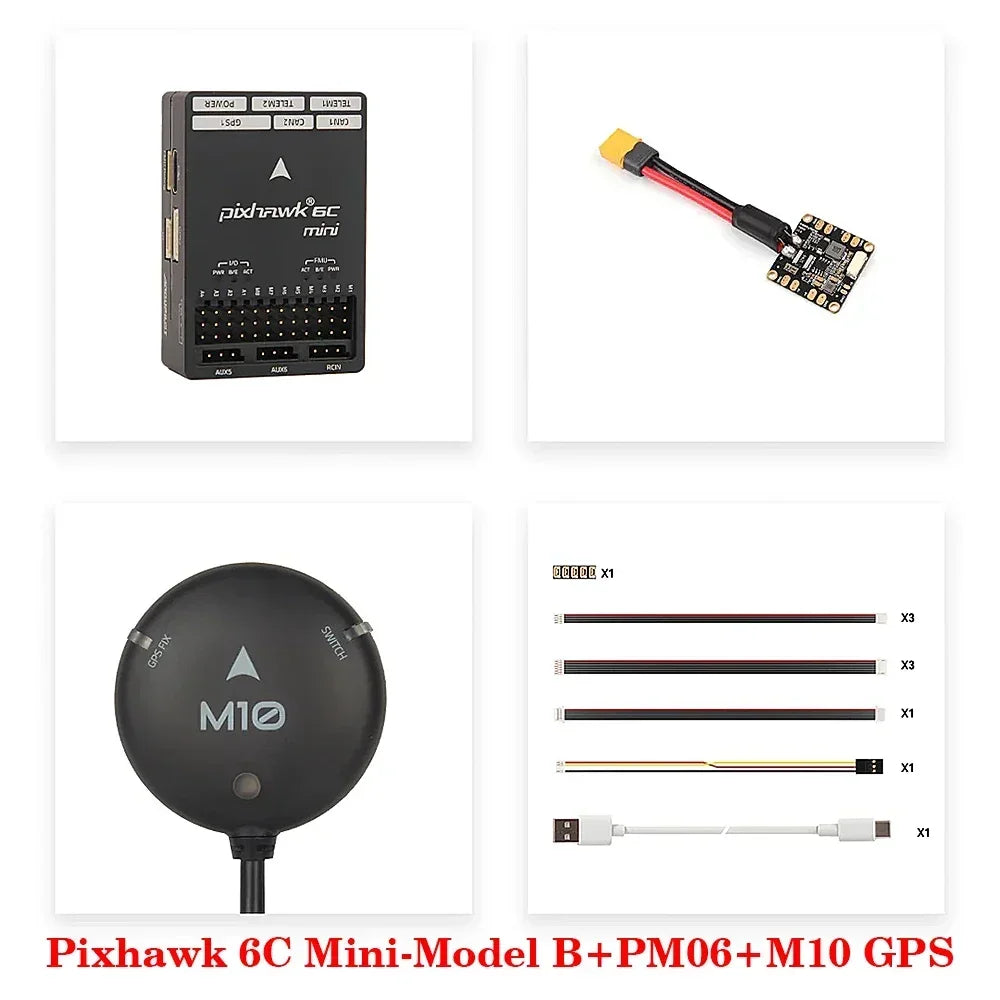
Der Pixhawk® 6C Mini ist das neueste Update der erfolgreichen Pixhawk® Flugreglerfamilie, basierend auf dem Pixhawk® FMUv6C Open Standard und Connector Standard. Er verfügt über denselben STMH743 Mikroprozessor und dieselben Sensoren wie der Pixhawk® 6C. Im Vergleich zum Standard Pixhawk® 6C verfügt diese Mini-Version über einen integrierten PWM-Header, und einige Anschlüsse wurden entfernt, um dieser Mini-Formfaktor zu ermöglichen.
Im Pixhawk® 6C Mini finden Sie einen STMicroelectronics®-basierten STM32H743, gepaart mit Sensortechnologie von Bosch® & InvenSense®, der Ihnen Flexibilität und Zuverlässigkeit bei der Steuerung jedes autonomen Fahrzeugs bietet, geeignet für akademische und kommerzielle Anwendungen.
Der H7-Mikrocontroller des Pixhawk® 6C Mini enthält den Arm® Cortex®-M7-Kern, der mit bis zu 480 MHz läuft und über 2 MB Flash-Speicher und 1 MB RAM verfügt. Dank der aktualisierten Verarbeitungsleistung können Entwickler produktiver und effizienter bei ihrer Entwicklungsarbeit sein, was komplexe Algorithmen und Modelle ermöglicht.
Der FMUv6C-Offenstandard umfasst leistungsstarke, rauscharme IMUs an Bord, die kostengünstig sein sollen und gleichzeitig IMU-Redundanz aufweisen. Ein Vibrationsisolationssystem filtert hochfrequente Vibrationen heraus und reduziert Rauschen, um genaue Messwerte zu gewährleisten, wodurch Fahrzeuge eine bessere Gesamtflugleistung erzielen können.
Der Pixhawk® 6C Mini ist perfekt für Entwickler in Unternehmensforschungslaboren, Start-ups, Akademiker (Forschung, Professoren, Studenten) und kommerzielle Anwendungen.
Wichtige Designpunkte
Hochleistungs-STM32H743-Prozessor mit mehr Rechenleistung & RAM
Neues kostengünstiges Design in kleinem Formfaktor
IMU-Redundanz mit Sensortechnologie von Bosch® & InvenSense®
Integriertes Vibrationsisolationssystem zur Filterung hochfrequenter Vibrationen und Reduzierung von Rauschen, um genaue Messwerte zu gewährleisten
IMUs sind durch integrierte Heizwiderstände temperaturgeregelt, was eine optimale Arbeitstemperatur der IMUs ermöglicht
Für technische Informationen besuchen Sie bitte unsere Pixhawk 6C Mini Dokumentationsseite.
Unterschiede zwischen dieser Mini-Version und dem "Standard" Pixhawk 6C finden Sie hier.
Hinweis:
M10 GPS erfordert PX4 1.14 & ArduPilot 4.3 oder neuer.