Holybro Pixhawk 6X Autopilot H753 Flugcontroller
Holybro Pixhawk 6X Autopilot H753 Flugcontroller
369 auf Lager
Verfügbarkeit für Abholungen konnte nicht geladen werden
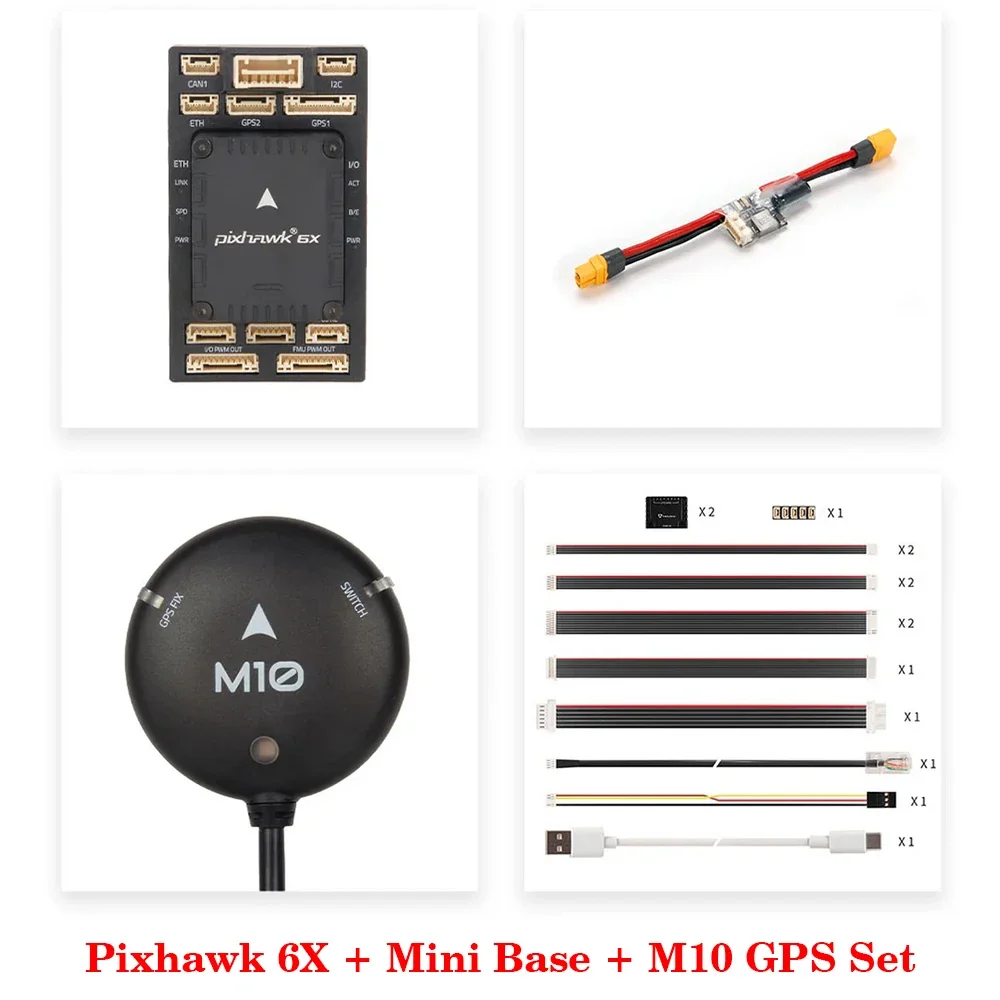
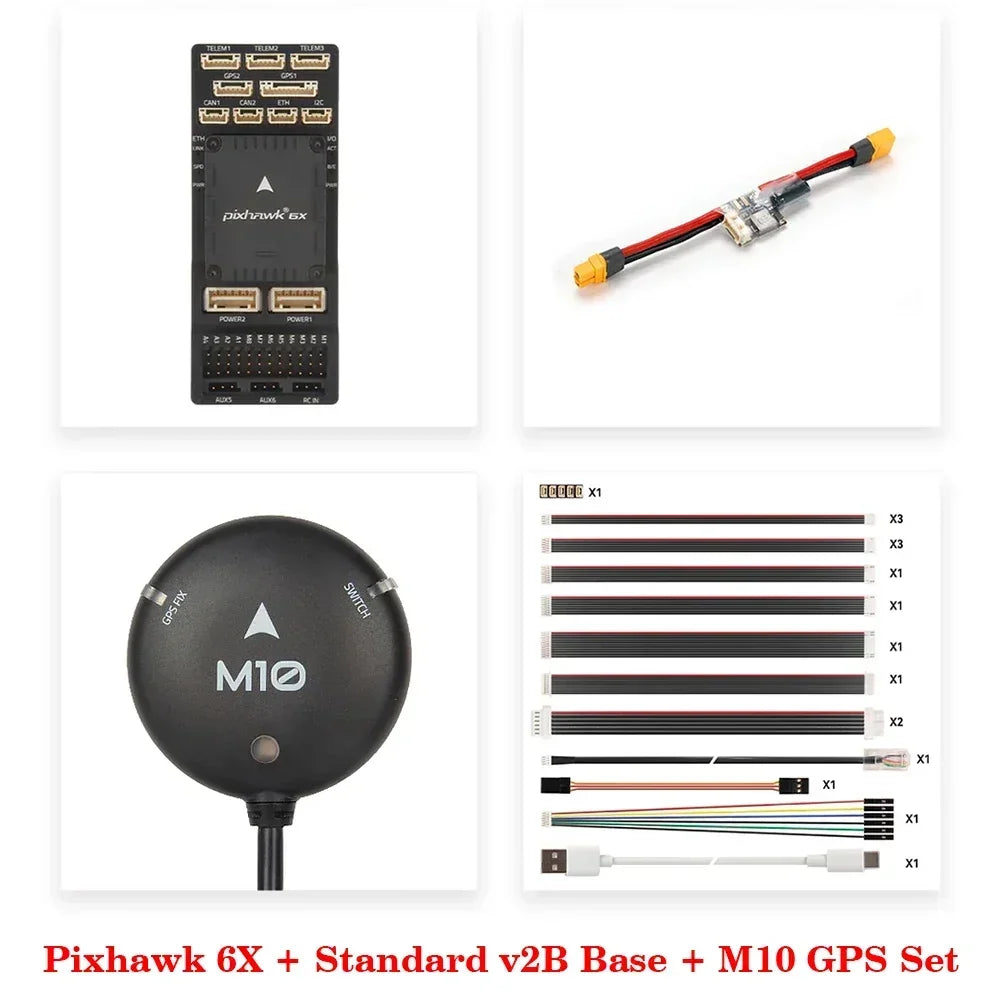
Holybro Pixhawk 6X Autopilot H753 Flugcontroller mit Standard V2A/ V2B Basis /Mini Basis /PM02D /M9N /M10 GPS für RC FPV Drohne
Wichtige Designmerkmale
Redundanz: 3x ICM-45686 IMU-Sensoren (±32g) mit BalancedGyro™-Technologie & 2x Barometer-Sensoren
Leistungsstarker STM32H753 Prozessor mit einer Taktrate von bis zu 480 MHz
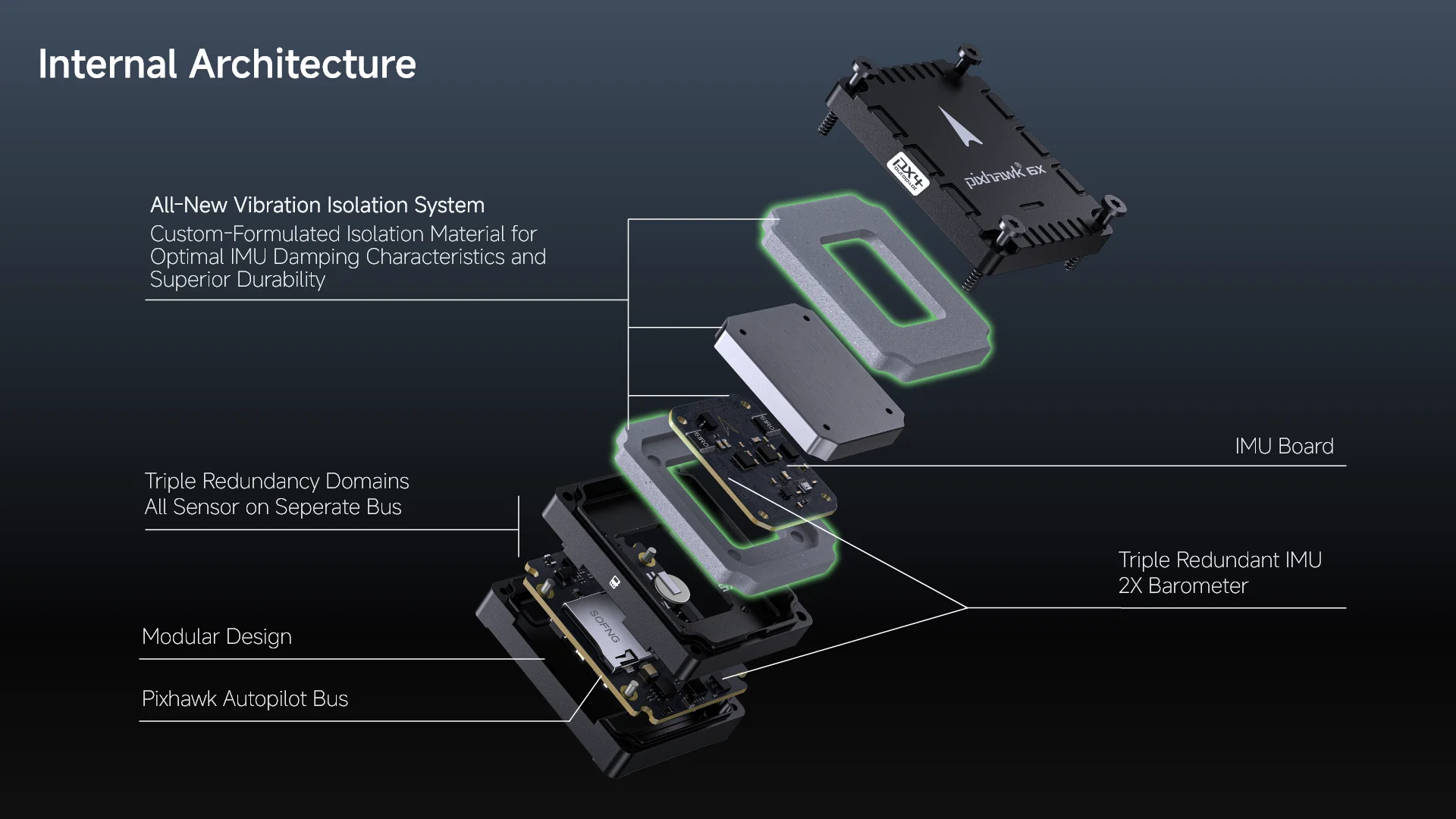
Modularer Flugcontroller: Getrennte IMU, FMU und Basissystem, verbunden über einen 100-Pin & einen 50-Pin Pixhawk® Autopilot Bus Stecker.
Dreifache Redundanzdomänen: Vollständig isolierte Sensordomänen mit separaten Bussen und separater Leistungsregelung
Brandneues, fortschrittliches, langlebiges Vibrationsisolationsmaterial mit Resonanzfrequenz im höheren Spektrum
Ethernet-Schnittstelle für Hochgeschwindigkeits-Missionscomputer-Integration. Transformatorlose Ausführung ist mit 50-Ohm-Abschlusswiderständen am Zielgerät möglich (AN2190 50 Ohm Abschluss).
Temperaturgesteuerte IMU-Platine, die die optimale Arbeitstemperatur der IMUs ermöglicht
Hardware-umschaltbarer 3.3V oder 5V Signalmodus (erfordert Modifikation der Basisplatine)
Unterstützung digitaler Leistungsmodule für eine bessere Genauigkeit der Spannungs- und Stromdaten
Dieses neue Vibrationsisolationsdesign verwendet das gleiche maßgeschneiderte, langlebige Isolationsmaterial wie der Pixhawk 6X Pro, anstelle des traditionellen Schaumstoffdesigns. Basiert auf umfangreicher Forschung und Entwicklung und Tests, bietet es optimale IMU-Dämpfungseigenschaften mit einer Resonanzfrequenz im höheren Spektrum, perfekt für industrielle und kommerzielle Drohnen.






Hinweis:
Die Rev 8 Version wird ab der PX4 1.14.3 Version oder höher sowie ab der stabilen Ardupilot 4.5.0 Version oder höher unterstützt. Sie wird standardmäßig mit PX4 Firmware geliefert. Benutzer können auch Ardupilot Firmware verwenden, indem sie die Firmware über Mission Planner oder QGroundControl flashen.
Spezifikation
Prozessoren & Sensoren
-
FMU-Prozessor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB Flash-Speicher, 1MB RAM
-
IO-Prozessor: STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
On-Board-Sensoren (derzeitige Lieferung, Rev8)
Beschleunigungsmesser/Kreisel: 3x ICM-45686 (mit BalancedGyro™ Technologie)
Barometer: ICP20100 & BMP388
Magnetometer: BMM150
-
On-Board-Sensoren (frühere Revision, Rev 3/4)
Beschleunigungsmesser/Kreisel: BMI088/ICM-20649
Beschleunigungsmesser/Kreisel: ICM-42688-P
Beschleunigungsmesser/Kreisel: ICM-42670-P
Magnetometer: BMM150
Barometer: 2x BMP388
Elektrische Daten
-
Nennspannungen:
Max. Eingangsspannung: 6V
USB-Stromeingang: 4.75~5.25V
Servoschiene-Eingang: 0~36V
-
Nennstromstärken:
Kombinierter Stromgrenzwert Telem1 & GPS2: 1.5A
Kombinierter Stromgrenzwert aller anderen Anschlüsse: 1.5A
-
PWM-Signalspannung:
Standard 3.3V (einstellbar auf 5V durch Änderung eines Widerstandes auf der Platine)
Betriebstemperatur: -25-85°C
Mechanische Daten
-
Abmessungen
Flugcontroller-Modul: 38.8 x 31.8 x 16.8mm
Standard-Basisplatine: 52.4 x 102 x 16.7mm (Aluminium)
Mini-Basisplatine: 43.4 x 72.8 x 14.2 mm
-
Gewicht
Flugcontroller-Modul: 31.3g
Standard-Basisplatine: 72.5g (Aluminium)
Mini-Basisplatine: 26.5g
Aktuelle Informationen zu unterstützter Firmware.
Für weitere technische Informationen besuchen Sie bitte https://docs.holybro.com/.
SKU FC Modul nur beinhaltet:
Pixhawk 6X Flugregler-Modul
SKU 6X Mini Basisset/ 6X Standard v2A Set/ 6X Standard v2B Set beinhaltet:
Pixhawk 6X Flugregler-Modul
Pixhawk 6X Flugregler-Modul