






Holybro Pixhawk 6X-RT Flugregler
Holybro Pixhawk 6X-RT Flugregler
Auf Lager
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
-
Der Pixhawk 6X-RT basiert auf dem Pixhawk® FMUv6X-RT Open Standard und dem Pixhawk® Bus Standard. Er wird mit vorinstallierter PX4® Firmware geliefert. Im Pixhawk 6X-RT Flugcontroller befindet sich ein NXP-basierter i.MXRT1176 MCU, gepaart mit Sensortechnologie von Bosch® und InvenSense®, die Ihnen Flexibilität und Zuverlässigkeit für die Steuerung jedes autonomen Fahrzeugs bietet.
-
Der i.MXRT1176 Mikrocontroller enthält einen Arm® Cortex-M7 mit 1 GHz und einen Cortex-M4 mit 400 MHz. Er verfügt über 2 MB SRAM und 64 MB Octal SPI Flash. Dank der aktualisierten Verarbeitungsleistung können Entwickler produktiver und effizienter arbeiten und komplexe Algorithmen und Modelle umsetzen.
-
Er verfügt über hochleistungsfähige, rauscharme IMUs, die für eine bessere Stabilisierung ausgelegt sind, und besitzt dreifach redundante IMUs und doppelt redundante Barometer auf separaten Bussen. Wenn die Firmware einen Sensorfehler erkennt, schaltet das System nahtlos auf einen anderen um, um die Zuverlässigkeit der Flugsteuerung zu gewährleisten. Ein unabhängiger LDO versorgt jeden Sensorsatz mit unabhängiger Leistungsregelung. Ein Vibrationsisolationssystem zur Filterung hochfrequenter Vibrationen und zur Reduzierung von Rauschen gewährleistet genaue Messwerte, sodass Fahrzeuge eine bessere Gesamtflugleistung erreichen können. Eine integrierte Microchip Ethernet PHY ermöglicht nun eine Hochgeschwindigkeitskommunikation mit Missionscomputern über Ethernet.
-
Der Pixhawk 6X-RT ist perfekt für Entwickler in Unternehmensforschungslaboren, Startups, Akademikern (Forschung, Professoren, Studenten) und kommerziellen Anwendungen. Dieser Flugcontroller ist mit jeder Basisplatine kompatibel, die den Pixhawk-Busstandard verwendet, wie z.B. die Pixhawk Basisplatine, Pixhawk Mini Basisplatine, und Pixhawk RPi CM4 Basisplatine.
Wichtige Designpunkte
-
Hochleistungs-Dual-Core i.MXRT1176-Prozessor mit Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
-
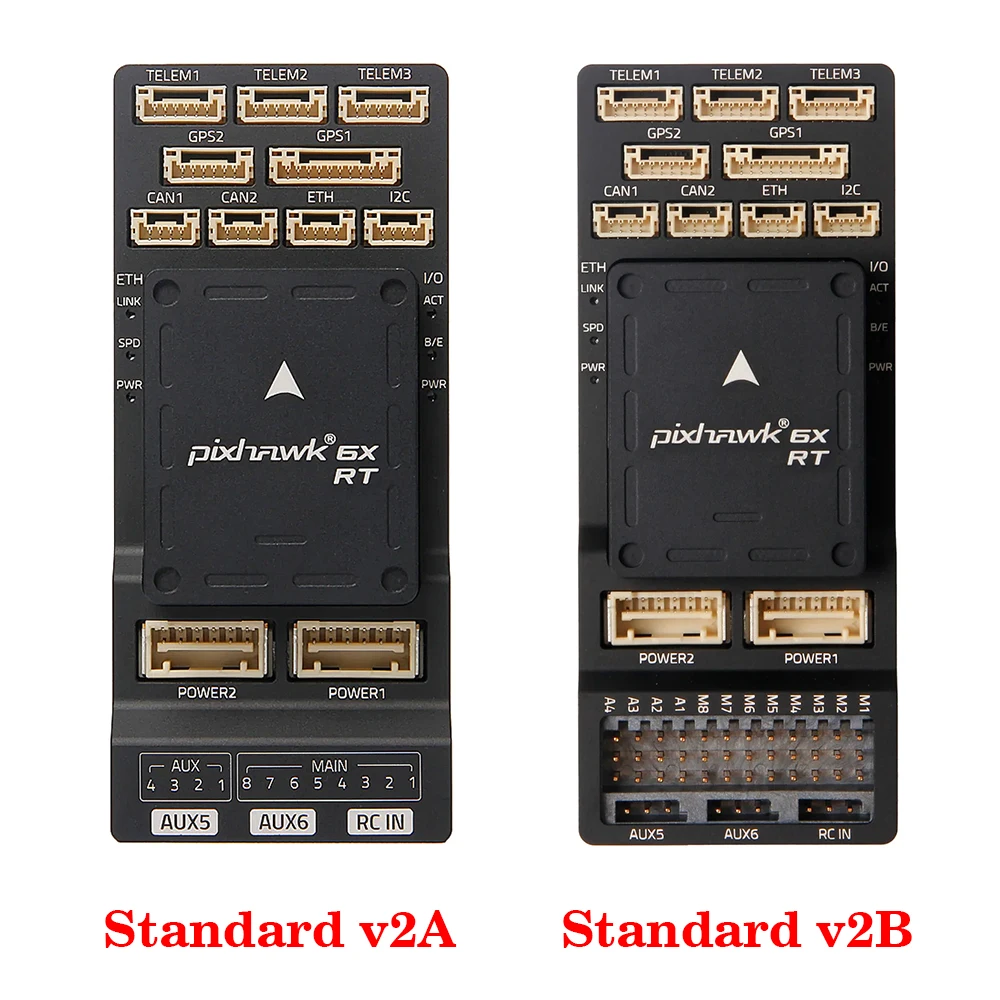
Modularer Flugcontroller: Getrennte IMU-, FMU- und Basissysteme, verbunden über einen 100-Pin- und einen 50-Pin-Pixhawk®-Bus-Stecker.
-
Redundanz: 3x IMU-Sensoren & 2x Barometer-Sensoren auf separaten Bussen
-
Dreifache Redundanzbereiche: Vollständig isolierte Sensorbereiche mit separaten Bussen und separater Stromversorgung
-
Vibrationsisolationssystem zur Filterung hochfrequenter Vibrationen und Reduzierung von Rauschen, um genaue Messwerte zu gewährleisten
-
Ethernet-Schnittstelle für die Hochgeschwindigkeitsintegration von Missionscomputern
-
IMUs sind temperaturkontrolliert durch integrierte Heizwiderstände, was eine optimale Betriebstemperatur der IMUs ermöglicht
-
Hardware-Sicherheitselement NXP EdgeLock SE051, eine Erweiterung der weithin bewährtenEdgeLock SE050 Plug & Trust Secure Element Familie, unterstützt Applet-Updates im Feld und bietet bewährte Sicherheit, zertifiziert nach CC EAL 6+, mit AVA_VAN.5 bis zur OS-Ebene, für starken Schutz gegen die neuesten Angriffsszenarien. Z.B. zur sicheren Speicherung der Bediener-ID
Hinweis:
-
Diese Entwicklerversion für Early Adopters, während wir weiterhin Flugteststunden sammeln
-
Dieser Flugcontroller wird derzeit nur im PX4 Flight Stack unterstützt. (Firmware-Ziel: FMUv6xrt). Er wird derzeit nicht in Ardupilot unterstützt.
-
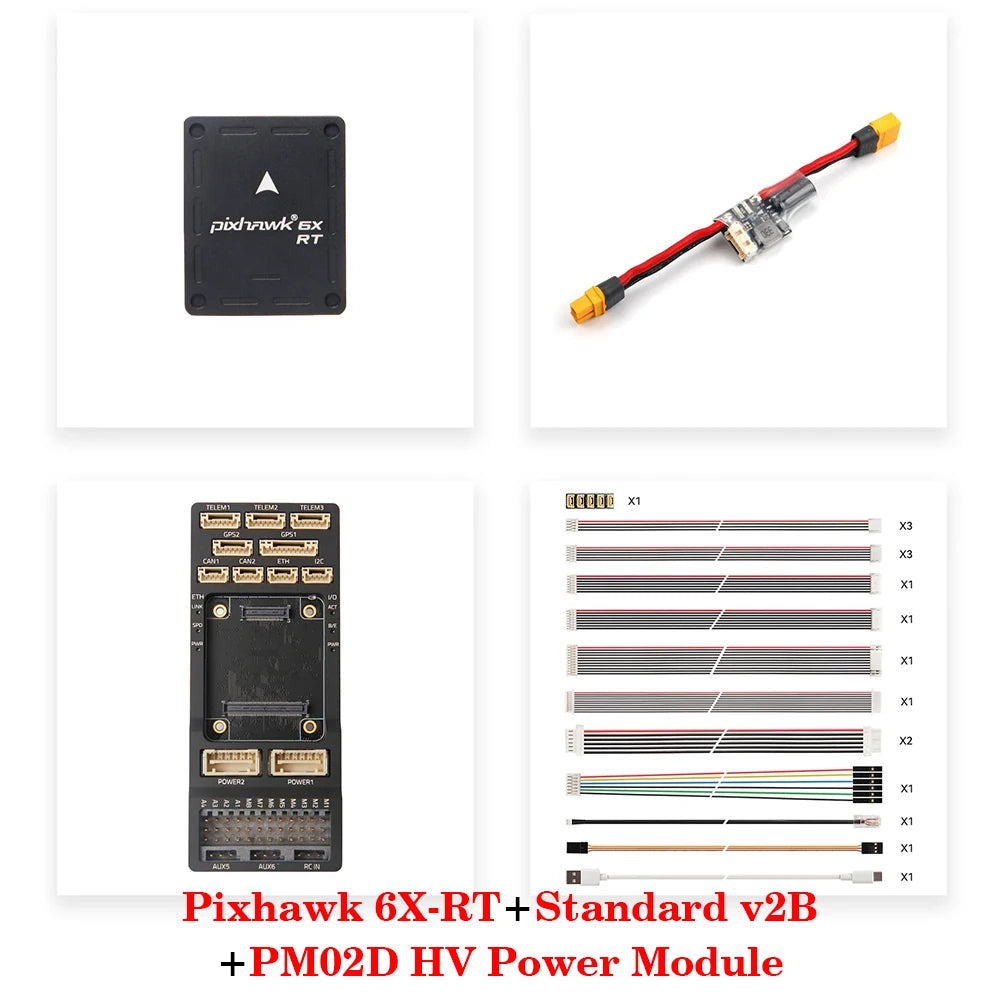
Dieser Flugcontroller verwendet digitale oder DroneCAN-Leistungsmodule (wie Pixhawk 6X, vollständige Liste finden Sie hier) Vergleichstabelle für Leistungsmodule
Spezifikation
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1 GHz
-
i.MX RT1176– Produktseite 1 GHz Crossover MCU mit Arm® Cortex® Cores
-
EdgeLock® SE051: Bewährte, benutzerfreundliche IoT-Sicherheitslösung mit Unterstützung für Aktualisierbarkeit und benutzerdefinierte Applets





-








- Wenn du dich für eine Auswahl entscheidest, wird die Seite komplett aktualisiert.
- Wird in einem neuen Fenster geöffnet.