Contrôleurs de vol Holybro Pixhawk 6C Autopilot (Plastique)
Contrôleurs de vol Holybro Pixhawk 6C Autopilot (Plastique)
369 en stock
Impossible de charger la disponibilité du service de retrait
Le Pixhawk® 6C est la dernière mise à jour de la famille réussie de contrôleurs de vol Pixhawk®, basée sur la norme ouverte et la norme de connecteur Pixhawk® FMUv6C. Il est livré avec PX4 Autopilot® préinstallé. À l'intérieur du Pixhawk® 6C, vous trouverez un STM32H743 basé sur STMicroelectronics®, associé à la technologie de capteurs de Bosch® et InvenSense®, vous offrant flexibilité et fiabilité pour contrôler tout véhicule autonome, adapté aux applications académiques et commerciales.
Le microcontrôleur H7 du Pixhawk® 6C contient le cœur Arm® Cortex®-M7 cadencé jusqu'à 480 MHz, dispose de 2 Mo de mémoire flash et de 1 Mo de RAM. Grâce à la puissance de traitement mise à jour, les développeurs peuvent être plus productifs et efficaces dans leur travail de développement, permettant des algorithmes et des modèles complexes. La norme ouverte FMUv6C comprend des IMU hautes performances et à faible bruit intégrées, conçues pour être rentables tout en offrant une redondance IMU. Un système d'isolation des vibrations pour filtrer les vibrations haute fréquence et réduire le bruit afin d'assurer des lectures précises, permettant aux véhicules d'atteindre de meilleures performances de vol globales. Le Pixhawk® 6C est parfait pour les développeurs des laboratoires de recherche d'entreprise, les startups, les universitaires (recherche, professeurs, étudiants) et les applications commerciales.
Points clés de conception:
Processeur H7 haute performance avec une vitesse d'horloge jusqu'à 480 MHz
Nouvelle conception économique avec un facteur de forme discret
Unité de mesure inertielle (IMU) redondante de Bosch® & InvenSense®
Système d'isolation des vibrations intégré nouvellement conçu pour filtrer les vibrations haute fréquence et réduire le bruit afin de garantir des lectures précises
Les IMU sont contrôlées en température par des résistances chauffantes embarquées, permettant une température de fonctionnement optimale des IMU
Le GPS M10 nécessite PX4 1.14 et ArduPilot 4.3 ou une version plus récente.

Spécification
Processeurs et capteurs
-
Processeur FMU: STM32H743
32 bits Arm® Cortex®-M7, 480 MHz, 2 Mo de mémoire, 1 Mo de SRAM
-
Processeur E/S: STM32F103
32 bits Arm® Cortex®-M3, 72 MHz, 64 Ko de SRAM
-
Capteurs embarqués
Accélérateur/Gyroscope: ICM-42688-P
Accélérateur/Gyroscope: BMI055
Magnétomètre: IST8310
Baromètre: MS5611
Données électriques
-
Tensions nominales:
Tension d'entrée max: 6V
Entrée d'alimentation USB: 4,75~5,25V
Entrée rail servo: 0~36V
-
Courants nominaux:
Limiteur de courant de sortie max Telem1: 1,5A
Limiteur de courant de sortie combiné de tous les autres ports: 1,5A
Données mécaniques
Dimensions: 84,8 * 44 * 12,4 mm
Poids (boîtier en aluminium): 59,3g
Poids (boîtier en plastique): 34,6g
Pour d'autres informations techniques, veuillez visiter https://docs.holybro.com/.
Dernières informations sur Firmware pris en charge.
Ensemble Pixhawk 6C (plastique) + PM02 V3 12S / Ensemble Pixhawk 6C (plastique) + PM06 14S / Ensemble Pixhawk 6C (plastique) + PM07 14S comprend:
Contrôleur de vol Pixhawk 6C
Module d'alimentation: PM02 V3 12S/PM0614S/PM07 14S
Jeu de câbles
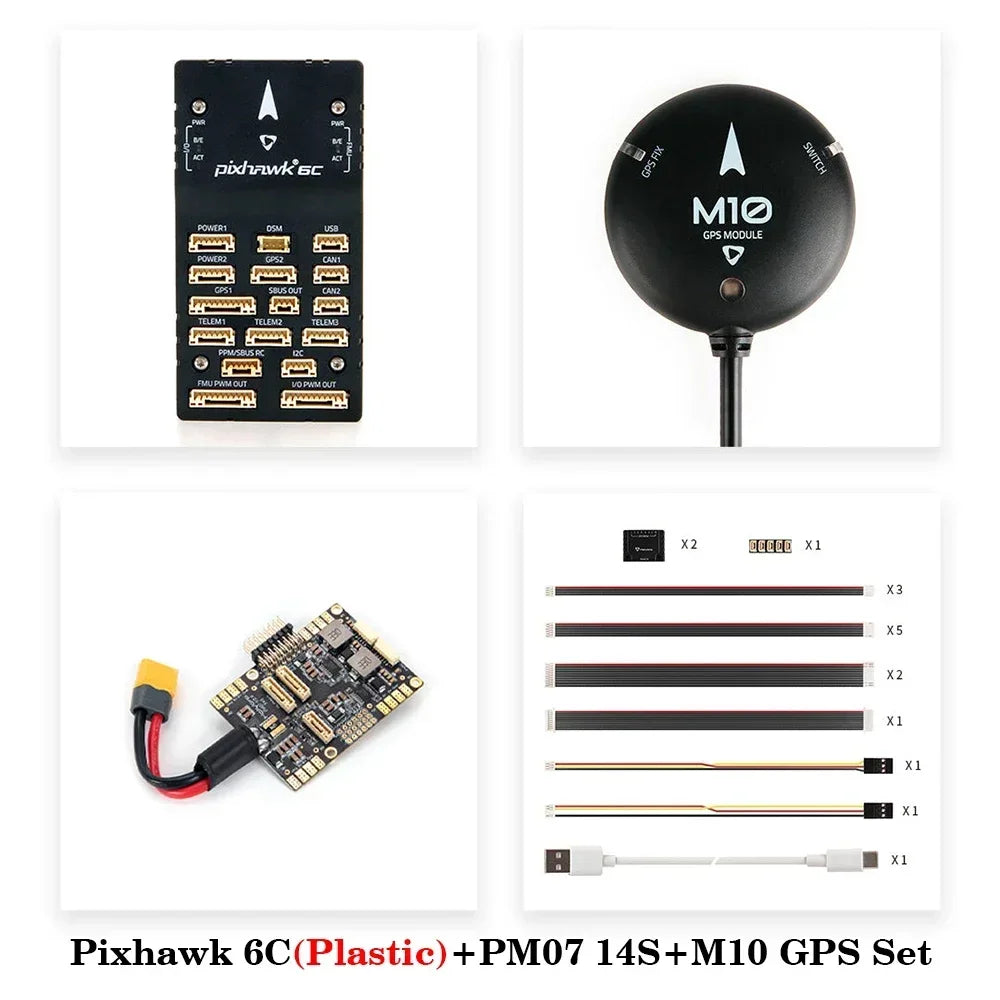
Ensemble Pixhawk 6C (plastique) + PM02 V3 12S + M9N, GPS M10 / Ensemble Pixhawk 6C (plastique) + PM06 14S + M9N, GPS M10 / Ensemble Pixhawk 6C (plastique) + PM07 14S + M9N, GPS M10 comprend:
Contrôleur de vol Pixhawk 6C
Module d'alimentation: PM02 V3 12S/PM0614S/PM07 14S
Jeu de câbles