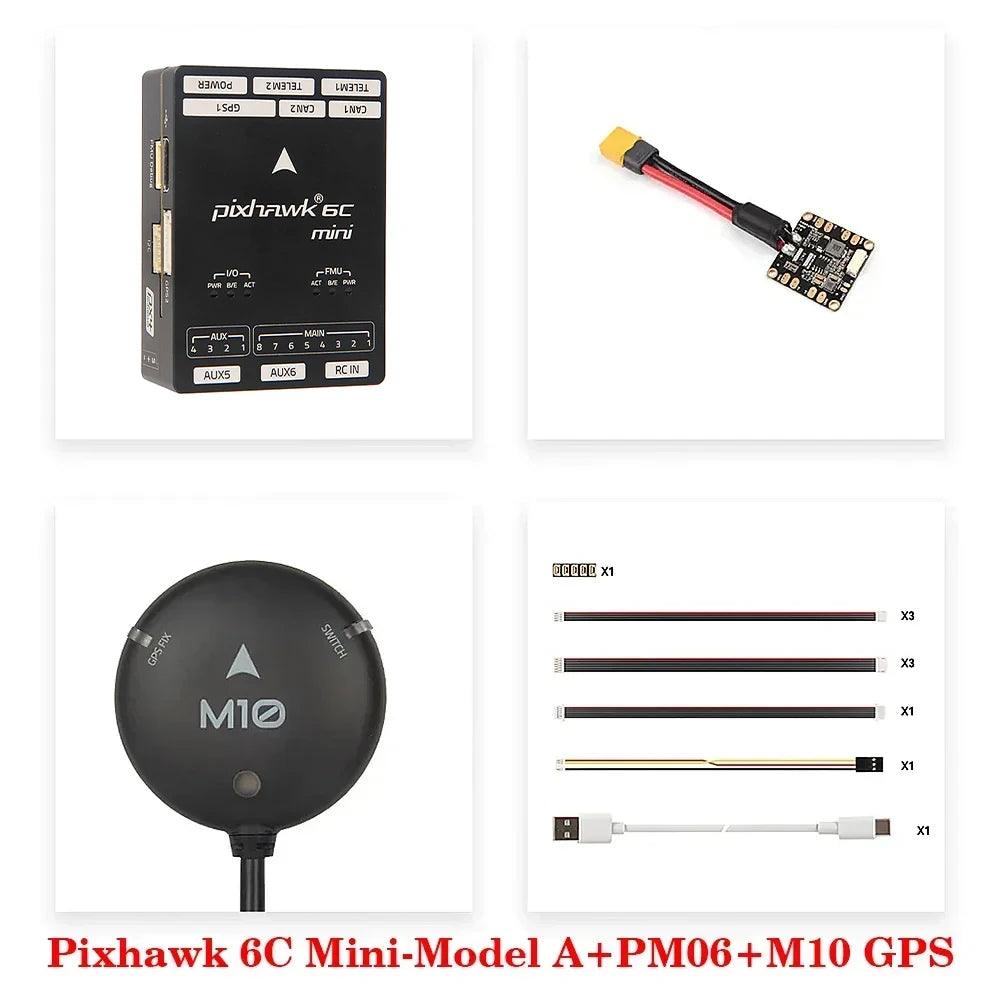
Contrôleur de vol Holybro Pixhawk 6C Mini Modèle A
Contrôleur de vol Holybro Pixhawk 6C Mini Modèle A
369 en stock
Impossible de charger la disponibilité du service de retrait
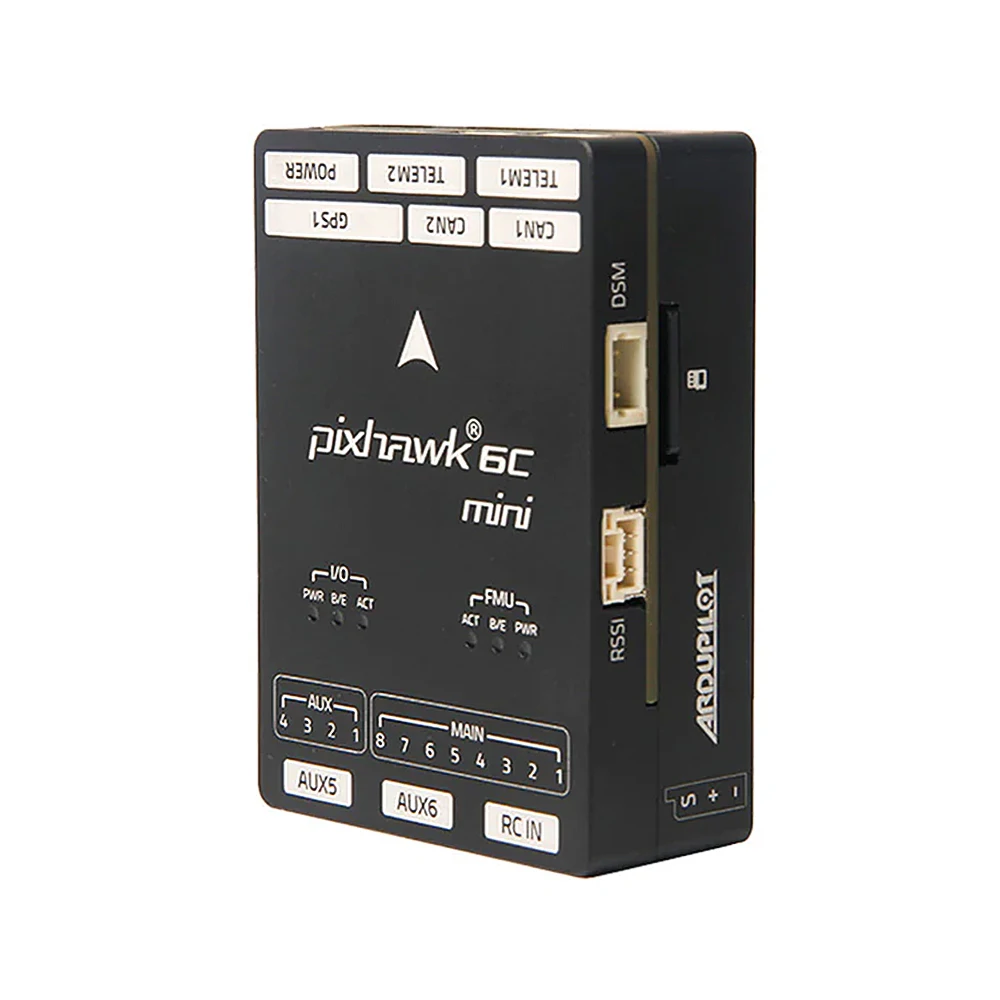
Le Pixhawk® 6C Mini est la dernière mise à jour de la famille de contrôleurs de vol Pixhawk®, basée sur la norme ouverte Pixhawk® FMUv6C et la norme de connecteur. Il partage le même microprocesseur STMH743 et les mêmes capteurs que le Pixhawk® 6C. Par rapport au Pixhawk® 6C standard, cette version Mini dispose d'un en-tête PWM intégré, et certains ports ont été supprimés pour s'adapter à ce format Mini.
À l'intérieur du Pixhawk® 6C Mini, vous trouverez un STM32H743 basé sur STMicroelectronics®, associé à la technologie de capteurs de Bosch® & InvenSense®, vous offrant flexibilité et fiabilité pour le contrôle de tout véhicule autonome, adapté aux applications académiques et commerciales.
Le microcontrôleur H7 du Pixhawk® 6C Mini contient le cœur Arm® Cortex®-M7 cadencé jusqu'à 480 MHz et dispose de 2 Mo de mémoire flash et de 1 Mo de RAM. Grâce à la puissance de traitement mise à jour, les développeurs peuvent être plus productifs et efficaces dans leur travail de développement, permettant des algorithmes et des modèles complexes.
La norme ouverte FMUv6C comprend des IMU hautes performances et à faible bruit, conçues pour être rentables tout en ayant une redondance IMU. Un système d'isolation des vibrations pour filtrer les vibrations haute fréquence et réduire le bruit afin d'assurer des lectures précises, permettant aux véhicules d'atteindre de meilleures performances de vol globales.
Le Pixhawk® 6C Mini est parfait pour les développeurs dans les laboratoires de recherche d'entreprise, les startups, les universitaires (recherche, professeurs, étudiants) et les applications commerciales.
Points de conception clés
Processeur STM32H743 haute performance avec plus de puissance de calcul et de RAM
Nouveau design rentable dans un petit facteur de forme
Redondance IMU avec la technologie de capteurs de Bosch® & InvenSense®
Système d'isolation des vibrations intégré pour filtrer les vibrations haute fréquence et réduire le bruit afin d'assurer des lectures précises
Les IMU sont contrôlés en température par des résistances chauffantes embarquées, permettant une température de fonctionnement optimale des IMU
Mode de signal PWM commutable matériellement 3.3V ou 5V (nécessite l'ouverture du boîtier)
Processeurs & capteurs
-
Processeur FMU : STM32H743
Arm® Cortex®-M7 32 bits, 480 MHz, 2 Mo de mémoire, 1 Mo de SRAM
-
Processeur IO : STM32F103
Arm® Cortex®-M3 32 bits, 72 MHz, 64 Ko de SRAM
-
Capteurs embarqués
Accélérateur/Gyroscope : ICM-42688-P
Accélérateur/Gyroscope : BMI088 (BMI055 arrêté en raison de la fin de production du capteur)
Mag : IST8310
Baromètre : MS5611
Données électriques
-
Tensions nominales :
Tension d'entrée maximale : 6V
Entrée d'alimentation USB : 4.75~5.25V
Entrée du rail servo : 0~36V
La nouvelle version Modèle A fournit désormais un signal PWM plus stable en charge
-
Courants nominaux :
Limite de courant combinée Telem1 & GPS2 : 1.5A
Limite de courant combinée de tous les autres ports : 1.5A
Température de fonctionnement : -40 ~ 85°c
Données mécaniques
Dimensions (Modèle A Legacy): 53.3 * 39 * 16.2 mm
Dimensions (Modèle A actuel) : 54.3x39x17.5 mm
Poids (Modèle A Legacy) : 39.2g
Poids (Modèle A actuel) : 42.4g
Le GPS M10 nécessite PX4 1.14 & ArduPilot 4.3 ou plus récent.