Contrôleur de vol Holybro Pixhawk 6X Autopilot H753
Contrôleur de vol Holybro Pixhawk 6X Autopilot H753
369 en stock
Impossible de charger la disponibilité du service de retrait
Contrôleur de vol Holybro Pixhawk 6X Autopilot H753 avec base standard V2A/V2B /mini base /PM02D /M9N /GPS M10 pour drone RC FPV
Points clés de conception
Redondance : 3 capteurs IMU ICM-45686 (±32g) avec technologie BalancedGyro™ et 2 capteurs barométriques
Processeur STM32H753 haute performance avec une vitesse d'horloge allant jusqu'à 480 MHz
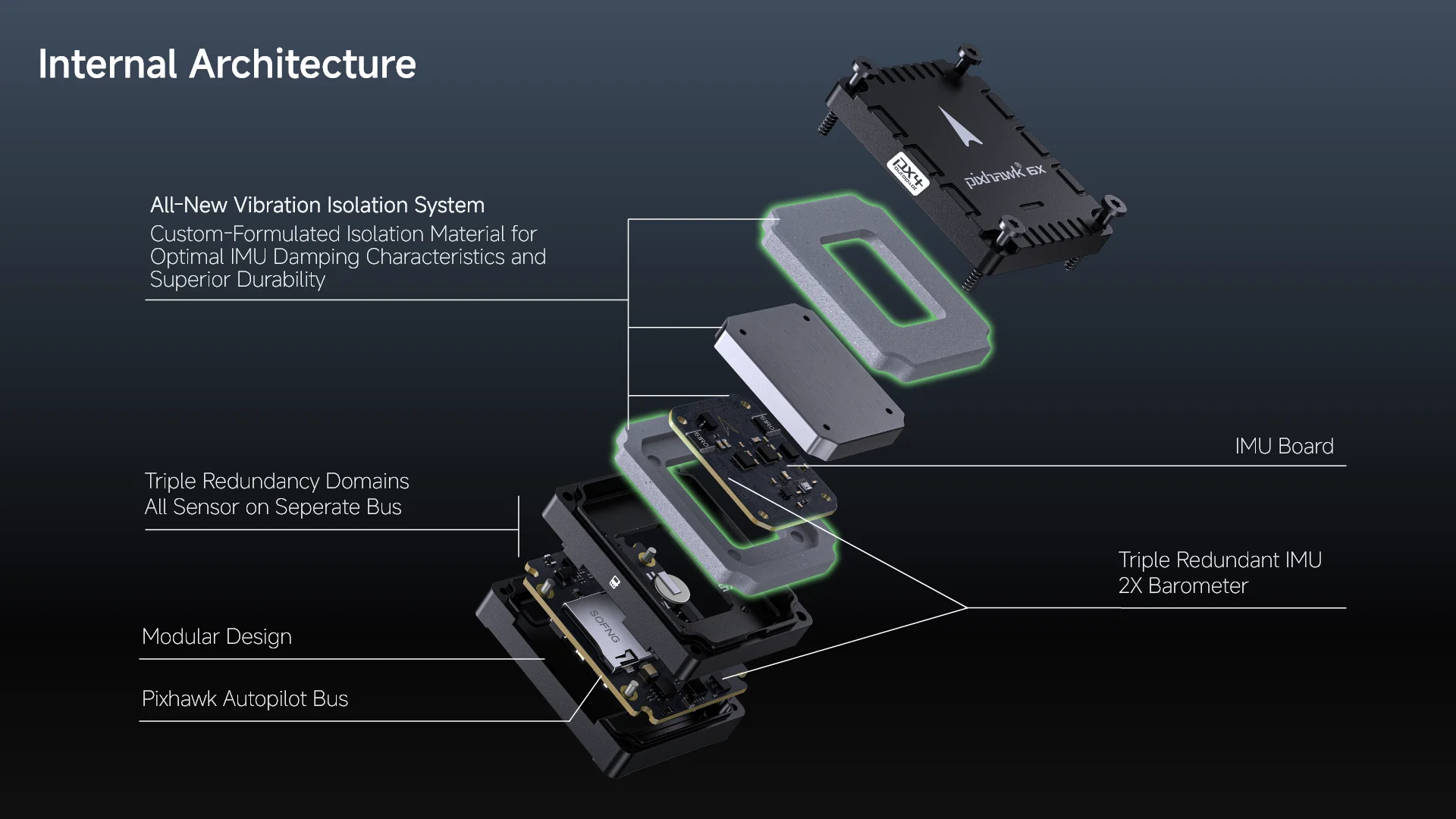
Contrôleur de vol modulaire : système IMU, FMU et base séparés connectés par un connecteur de bus Pixhawk® Autopilot à 100 broches et un à 50 broches.
Domaines à triple redondance : domaines de capteurs complètement isolés avec des bus séparés et un contrôle de puissance séparé
Tout nouveau matériau d'isolation des vibrations durable et avancé avec une fréquence de résonance dans le spectre supérieur
Interface Ethernet pour une intégration d'ordinateur de mission haute vitesse. Sans transformateur peut être réalisé en utilisant des résistances de terminaison de 50 Ohms sur le périphérique cible (AN2190 terminaison 50 Ohms).
Carte IMU à température contrôlée, permettant la température de fonctionnement optimale des IMU
Mode de signal 3,3 V ou 5 V commutable par matériel (nécessite une modification de la carte de base)
Support de module d'alimentation numérique pour une meilleure précision des données de tension et de courant
Cette nouvelle conception d'isolation des vibrations utilise le même matériau d'isolation durable et formulé sur mesure que le Pixhawk 6X Pro, au lieu de la conception traditionnelle en mousse. Soutenue par une recherche et développement et des tests approfondis, elle offre des caractéristiques d'amortissement IMU optimales avec une fréquence de résonance dans le spectre supérieur, parfaite pour les drones industriels et commerciaux.






Note :
La version Rev 8 est prise en charge à partir de la version PX4 1.14.3 ou ultérieure, ainsi que de la version stable Ardupilot 4.5.0 ou ultérieure. Elle est livrée avec le micrologiciel PX4 par défaut. L'utilisateur peut également utiliser le micrologiciel Ardupilot en flashant le micrologiciel via Mission Planner ou QGroundControl.
Spécifications
Processeurs et capteurs
-
Processeur FMU : STM32H753
32 bits Arm® Cortex®-M7, 480 MHz, 2 Mo de mémoire flash, 1 Mo de RAM
-
Processeur E/S : STM32F103
32 bits Arm® Cortex®-M3, 72 MHz, 64 Ko de SRAM
-
Capteurs embarqués (Actuellement livrés, Rev8)
Accélérateur/Gyro : 3x ICM-45686 (avec technologie BalancedGyro™)
Baromètre : ICP20100 & BMP388
Mag : BMM150
-
Capteurs embarqués (Révision précédente, Rev 3/4)
Accélérateur/Gyro : BMI088/ICM-20649
Accélérateur/Gyro : ICM-42688-P
Accélérateur/Gyro : ICM-42670-P
Mag : BMM150
Baromètre : 2x BMP388
Données électriques
-
Tensions nominales :
Tension d'entrée max : 6V
Entrée d'alimentation USB : 4,75~5,25V
Entrée du rail servo : 0~36V
-
Courants nominaux :
Limite de courant combinée Telem1 & GPS2 : 1,5A
Limite de courant combinée de tous les autres ports : 1,5A
-
Tension du signal PWM :
3,3 V par défaut (réglable à 5 V avec un changement de résistance embarquée)
Température de fonctionnement : -25-85°C
Données mécaniques
-
Dimensions
Module contrôleur de vol : 38,8 x 31,8 x 16,8 mm
Carte de base standard : 52,4 x 102 x 16,7 mm (Aluminium)
Mini carte de base : 43,4 x 72,8 x 14,2 mm
-
Poids
Module contrôleur de vol : 31,3g
Carte de base standard : 72,5g (Aluminium)
Mini carte de base : 26,5g
Dernières informations sur le micrologiciel pris en charge.
Pour d'autres informations techniques, veuillez visiterhttps://docs.holybro.com/.
Le module FC SKU comprend uniquement :
Module de contrôleur de vol Pixhawk 6X
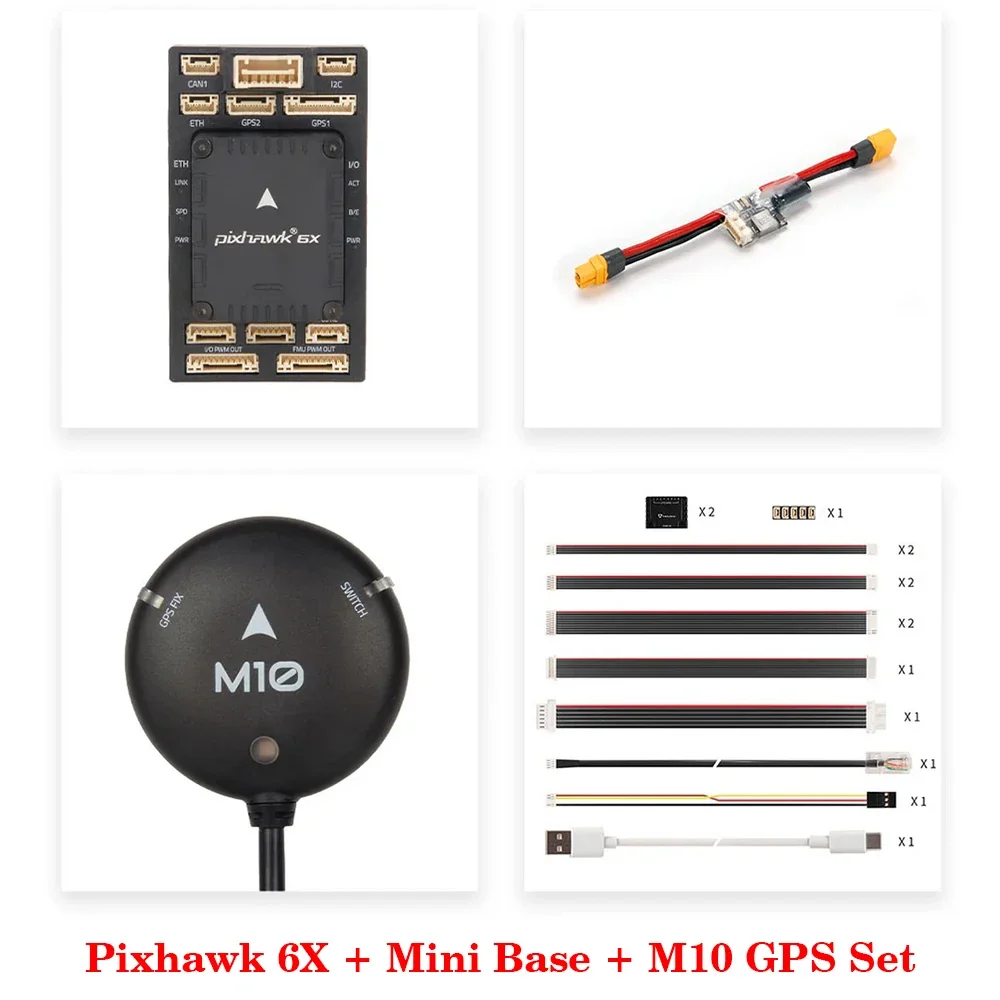
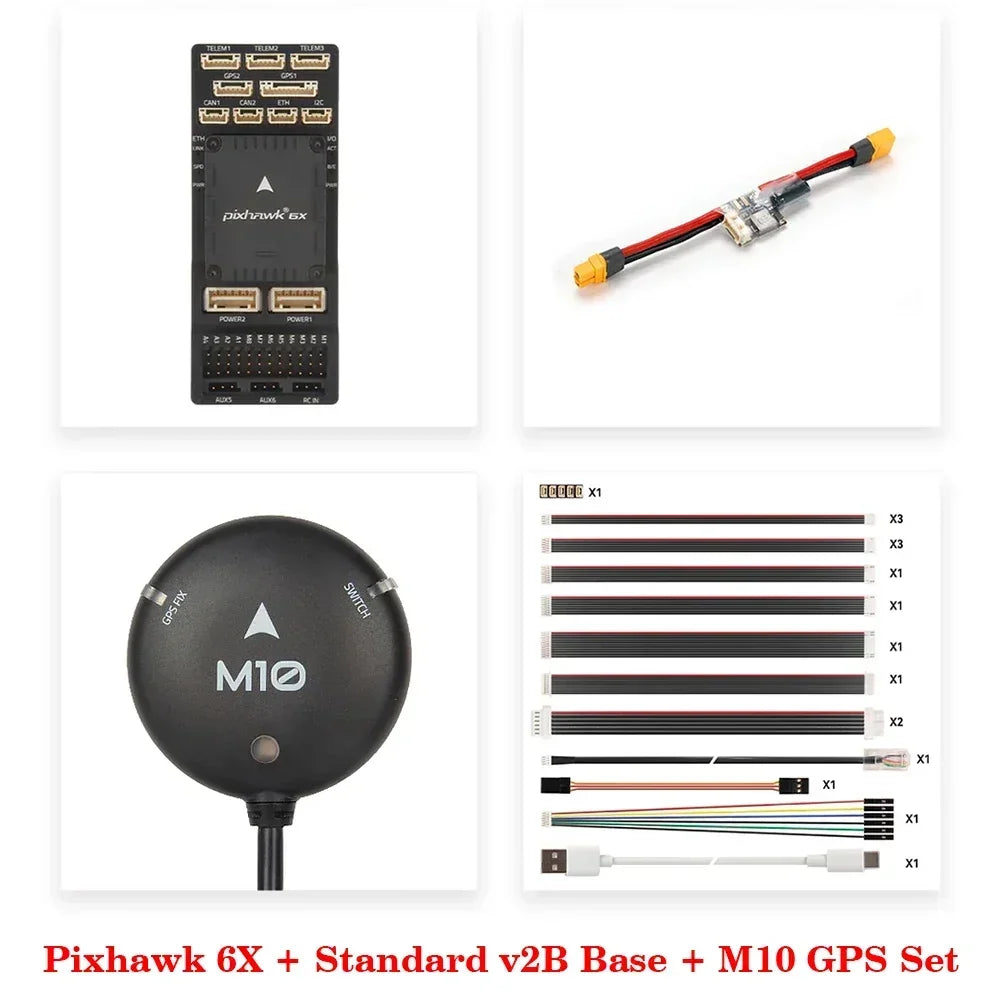
SKU 6X Mini Base Set/ 6X Standard v2A Set/ 6X Standard v2B Set comprend :
Module de contrôleur de vol Pixhawk 6X
Module de contrôleur de vol Pixhawk 6X