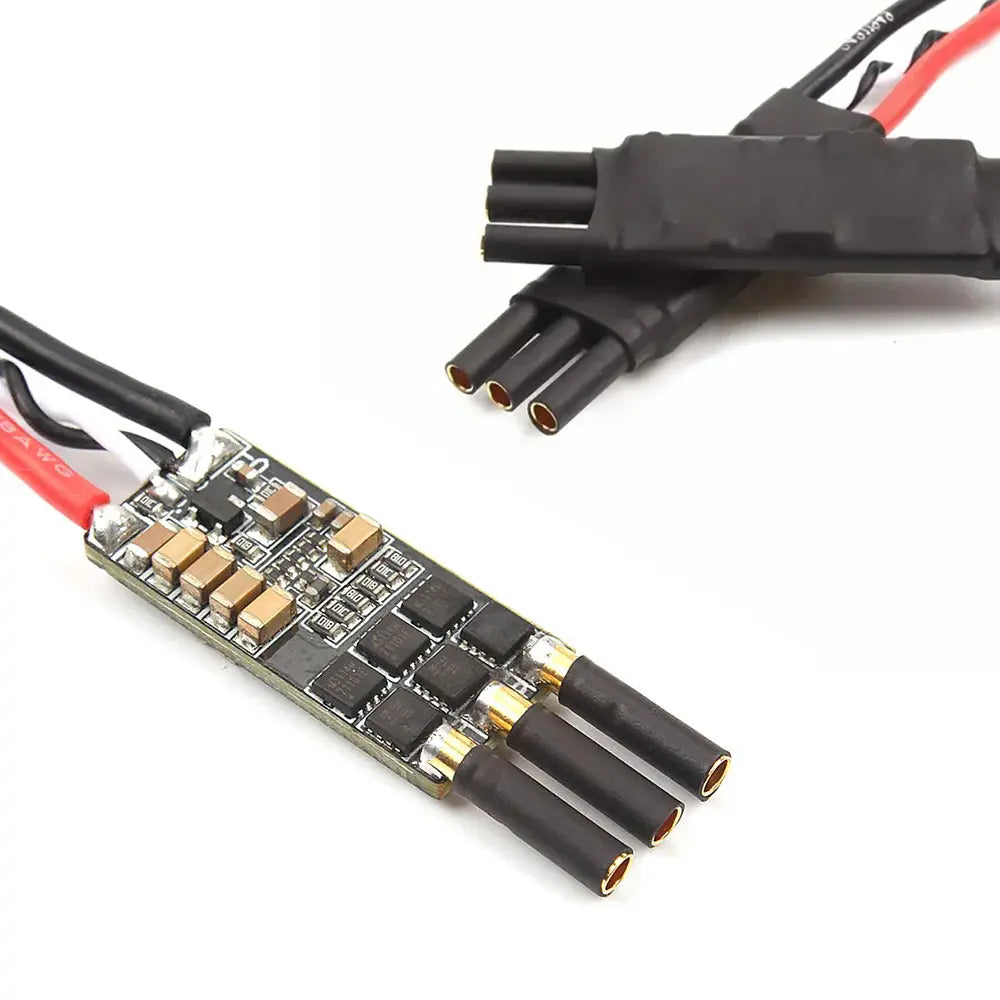
ESC Holybro QAV250 BLHeli-S 20A
ESC Holybro QAV250 BLHeli-S 20A
369 en stock
Impossible de charger la disponibilité du service de retrait
Caractéristiques principales
● MCU EFM8BB21F16G, cœur C8051 8 bits pipelined avec une fréquence de fonctionnement maximale de 50 MHz.
● Driver haute fréquence dédié, rend le démarrage plus doux. La vitesse maximale de l'ESC est de 500k eRPM.
● Le micrologiciel BLHeli-S est conçu pour des performances supérieures dans les multirotors et utilise un moteur généré par le matériel
PWM pour une réponse douce de l'accélérateur et un fonctionnement silencieux.
● Le freinage amorti effectue un freinage régénératif, ce qui provoque un ralentissement très rapide du moteur, et effectue également un
roue libre active.
● Prend en charge les moteurs KV plus élevés et une charge de puissance accrue, plus adapté au vol violent des drones de course.
● Le code prend en charge l'entrée PWM à largeur d'impulsion régulière de 1 à 2 ms, ainsi que Oneshot et Multshot. Le signal d'entrée est
automatiquement détecté par l'ESC à la mise sous tension.
● Prend en charge Dshot150, Dshot300 et Dshot600. Dshot est un signal numérique, la capacité anti-interférence est plus forte, et
ne nécessite pas de calibration des gaz.
● La paire torsadée en silicone du câble de signal d'accélérateur augmente la durée de vie, et réduit efficacement la diaphonie causée par la transmission du signal, et rend le vol plus stable.
Spécifications
Modèle: BLHeli-S ESC
Courant continu: 20A
Courant de crête (10S): 30A
BEC: NON
Cellules LiPo: 2-4S
*BLHeli-S utilise le firmware BLHeli-S A-H-30
Paramètre de programmation
Les paramètres de programmation ci-dessous sont accessibles à partir du logiciel de configuration (BLHeliSuite):
1. Puissance de démarrage:
La puissance de démarrage peut être définie sur des valeurs relatives de 0,031 à 1,5. C'est la puissance maximale autorisée au démarrage. La puissance réelle appliquée dépend de l'entrée des gaz, et peut être inférieure, mais le niveau minimum est un quart du niveau maximum. La puissance de démarrage affecte également le fonctionnement bidirectionnel, car le paramètre est utilisé pour limiter la puissance appliquée lors de l'inversion de direction. Pour les bas régimes, la puissance maximale du moteur est limitée, afin de faciliter la détection des faibles tensions de BEMF. La puissance maximale autorisée peut être définie via le paramètre de puissance de démarrage.
2. Calage de commutation:
Le calage de commutation peut être réglé sur faible/moyen-faible/moyen/moyen-élevé/élevé, ce qui correspond à une avance de calage de 0°/7,5°/15°/22,5°/30°. Généralement, un réglage moyen fonctionnera bien, mais si le moteur bégaye, il peut être bénéfique de modifier le calage. Certains moteurs à forte inductance peuvent avoir un temps de démagnétisation de commutation très long. Cela peut entraîner un arrêt ou un bégaiement du moteur lors d'une augmentation rapide des gaz, en particulier lorsqu'il fonctionne à bas régime. Un réglage élevé du calage permettra plus de temps pour la démagnétisation, et aide souvent.
3. Compensation de démagnétisation:
La compensation de démagnétisation est une fonctionnalité de protection contre les calages moteur causés par un temps de démagnétisation des enroulements trop long après la commutation. Le symptôme typique est l'arrêt ou le bégaiement du moteur lors d'une augmentation rapide des gaz, en particulier à bas régime. Comme mentionné ci-dessus, un calage de commutation élevé aide généralement, mais au détriment de l'efficacité. Généralement, une valeur plus élevée du paramètre de compensation offre une meilleure protection. Si la compensation de démagnétisation est trop élevée, la puissance maximale peut être quelque peu réduite.
4. Direction:
Le sens de rotation peut être réglé sur avant/arrière/bidirectionnel avant/bidirectionnel arrière. En mode bidirectionnel, le centre de l'accélérateur est zéro et au-dessus se trouve la rotation avant et en dessous la rotation arrière. Lorsque le fonctionnement bidirectionnel est sélectionné, la programmation par TX est désactivée.
5. Intensité du bip: Définit l'intensité des bips en fonctionnement normal.
6. Intensité de la balise:
Définit l'intensité des bips lorsque la balise émet des bips. L'ESC commencera à émettre des bips de balise si le signal d'accélérateur a été nul pendant un certain temps. Notez qu'un réglage élevé de l'intensité de la balise peut provoquer une surchauffe des moteurs ou des ESC!
7. Délai de balise: Le délai de balise définit le délai avant le début de l'émission de bips de balise.
8. Programmation par TX: Si désactivé, la calibration des gaz est désactivée.
Veuillez noter que le manche des gaz ne peut calibrer que la plage des gaz, et ne peut pas programmer de paramètres via le manche des gaz.
9. Gaz minimum, gaz maximum et gaz central:
Ces réglages définissent la plage des gaz de l'ESC. Le gaz central n'est utilisé que pour le fonctionnement bidirectionnel. Les valeurs données pour ces réglages sont pour un signal d'entrée normal de 1000us à 2000us, et pour les autres signaux d'entrée, les valeurs doivent être mises à l'échelle.
10. Protection thermique:
La protection thermique peut être activée ou désactivée. Et le seuil de température peut être programmé entre 80°C et 140°C (à partir de la rev16.3). L'ESC mesure la température à l'intérieur du MCU et limite la puissance du moteur si la température est trop élevée. La puissance du moteur est limitée en quatre étapes:
- Si la température est supérieure au seuil, la puissance du moteur est limitée à 75%.
- Si la température est supérieure au seuil de 5°C, la puissance du moteur est limitée à 50%.
- Si la température est supérieure au seuil de 10°C, la puissance du moteur est limitée à 25%.
- Si la température est supérieure au seuil de 15°C, la puissance du moteur est limitée à 0%.
11. Protection de puissance à bas régime:
La limitation de puissance pour les bas régimes peut être activée ou désactivée. La désactiver peut être nécessaire pour obtenir la pleine puissance sur certains moteurs à faible kV fonctionnant avec une basse tension d'alimentation. Cependant, la désactiver augmente le risque de perte de synchronisation, avec la possibilité de griller le moteur ou l'ESC.
12. Frein à l'arrêt:
Le frein à l'arrêt peut être activé ou désactivé. Lorsqu'il est activé, le frein sera appliqué lorsque l'accélérateur est à zéro. Pour un accélérateur non nul, ce réglage n'a aucun effet.